This tutorial is based on Rio Akasaka's tutorial on how to set up the the arduino pro mini and the bluetooth mate on a Mac, which is based on Jonathan Warren's tutorial on setting up the arduino mini pro and the bluetooth mate on a P.C.. I also used parts of code coming from the Sparkfun bluetooth tutorial.
I'm using:
1 Lilypad Arduino (atmega 328)
1 FTDI basic breakout
1 Bluetooh mate Gold (though Silver should work just as well)
NOTE THAT: bluetooth mate Gold and Silver from Sparkfun are made to work with the Lilypad: pins TX and RX are inverted on these boards (not the same as with the other boards).

I soldered the bluetooth pins so the lilypad and the bluetooth could lay horizontal when connected to each other.

I then connected the FTDI to the Lilypad so I could upload the initial test program Jonathan Warren wrote.
(select tools>Board> Lilypad Atmega 328)
/***********************
Bluetooth test program
***********************/
int counter = 0;
int incomingByte;
void setup() {
Serial.begin(115200);
}
void loop() {
// see if there's incoming serial data:
if (Serial.available() > 0) {
// read the oldest byte in the serial buffer:
incomingByte = Serial.read();
// if it's a capital R, reset the counter
if (incomingByte == 'R') {
Serial.println("RESET");
counter=0;
}
}
Serial.println(counter);
counter++;
delay(250);
}
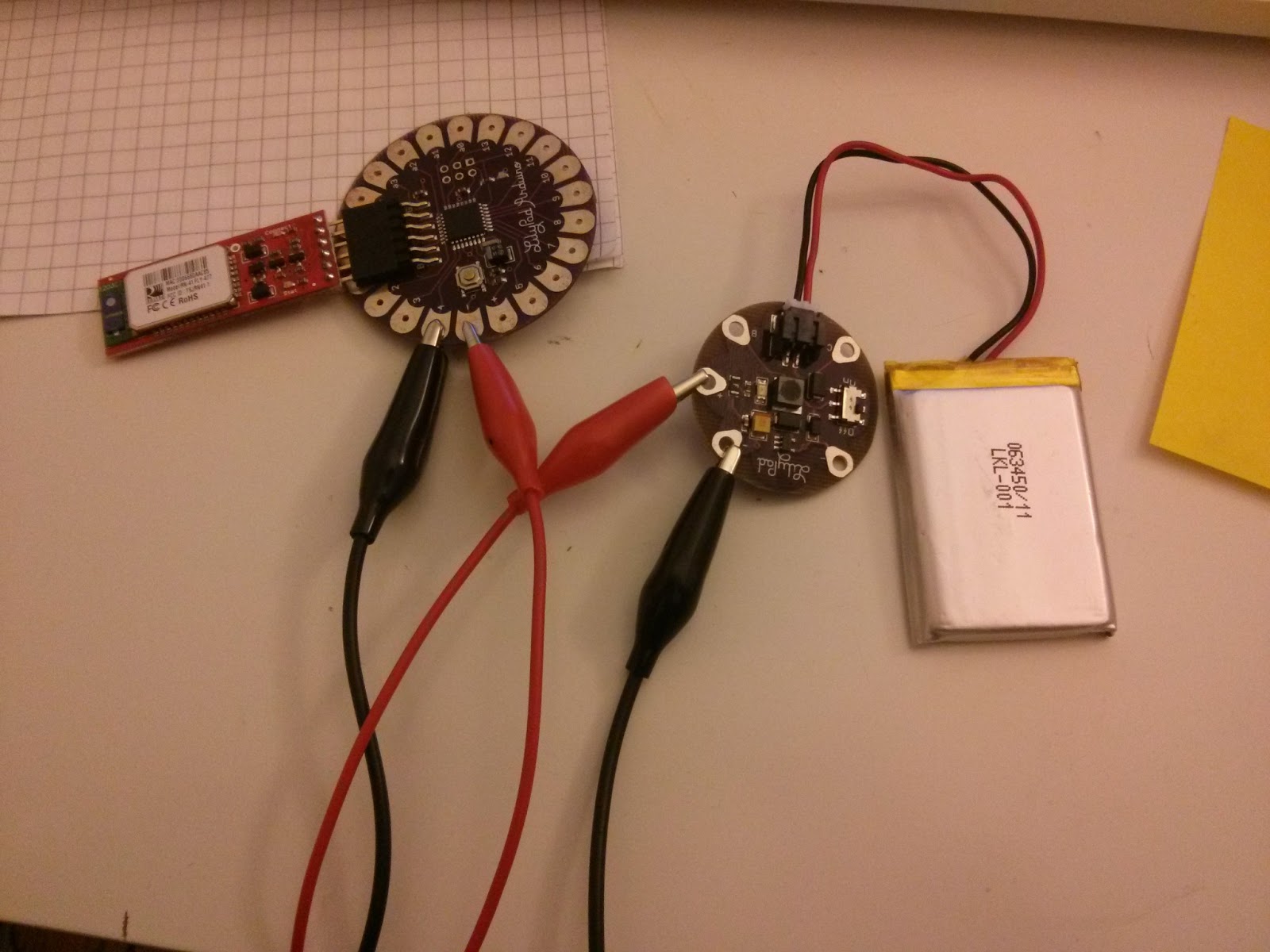
After uploading the program to the Lilypad, I disconnected the FTDI and connected the arduino to the LiPower and battery, and to the bluetooth mate module.
I then launched the Bluetooth assistant on my Mac, and followed the steps Akasaka described on his tutorial. Basically:
- opening the bluetooth preferences- turning on the bluetooth;- clicking on the + button;- looking for bluetooth devices;- selecting my bluetooth mate (probably a m.a.c address or a "FireFly this" or a "RN42 that");- pairing with it (password is 1234 by default); this adds the bluetooth mate to my bluetooth devices list;- I then select it on the list and then I click on the wheel, right next to the + button, to open more options;- then click on "Edit serial ports": this actually makes the computer connect to my bluetooth mate (haven't actually figured out why but it does).
After that I returned to the Arduino program on my computer and go to:

- Tools > Serial Port > and select dev/tty/*name of the bluetooth mate*
- then i open the serial monitor and voila.. numbers show up...
- Hit the R key and it starts counting from 0..
Remember: in order for this to work, your computer must be connected to the bluetooth mate, via the bluetooth assistant on your system preferences: selecting the mate from the list of devices and clicking on Edit serial ports... that does the trick...dunno why..
I tested sending letters and stuff just for fun, and it works fine (no strange characters like ÿâ or such)
I then wondered how I could go into Command mode and change some parameters on the bluetooth, like the name, password. Turns out it was pretty simple.
I changed the code a bit, and reuploaded it with the FTDI breakout to the Lilypad:
/*********************** Bluetooth test program ***********************/int incomingByte; void setup() { Serial.begin(115200); // print $$$ so the bluetooth enters command mode Serial.print($$$); // necessary delay delay(2000); }void loop() { // see if there's incoming serial data: if (Serial.available() > 0) { // read the oldest byte in the serial buffer: incomingByte = Serial.read(); // transform bytes into characters so I can read them, and print it through the bluetooth serial Serial.print((char)incomingByte); }delay(250); }
This actually allows me to open the serial monitor and send stuff to the Lilypad, which the bluetooth reads.
Re-opened the bluetooth assistant on the mac.. selected the mate from the list, and clicked on Edit serial ports (yeah i have to do it every single time..); connection established.
Opened the serial monitor on the arduino (dev/tty/*bluetooth mate name*)
Entered $$$ on the serial monitor (with No line Ending selected at the bottom of the serial monitor) and the bluetooth answered 'CMD' which means it went into command mode.
Entered D (with Newline selected from the bottom of the serial monitor) for basic settings, O for other settings .. (the entire list of commands can be found on Sparkfun: https://www.sparkfun.com/datasheets/Wireless/Bluetooth/rn-bluetooth-um.pdf)
And that is how I changed my bluetooth mate name from *FireFly this* to Papaye!
